
Application tips for LPR applications from an FAE
I often receive questions regarding recognition of license plates either asking for recommendation of what model camera would be the best selection, or asking for help with an existing application having difficulty. To address this application in particular and help you be successful in future applications this article will address specific considerations for License Plate Capture.
If the primary goal of the application is to capture and read license plates there are a number of things to consider in planning that will affect a satisfactory result.
• How fast will the cars be moving, is there a choke point?
• How wide is the field of view the camera will be capturing?
• Where will the camera be positioned relative to the target field of view?
• Illumination how well is the environment lit at night, will sunlight glare create any issues?
• Car headlights at night will they be an issue?
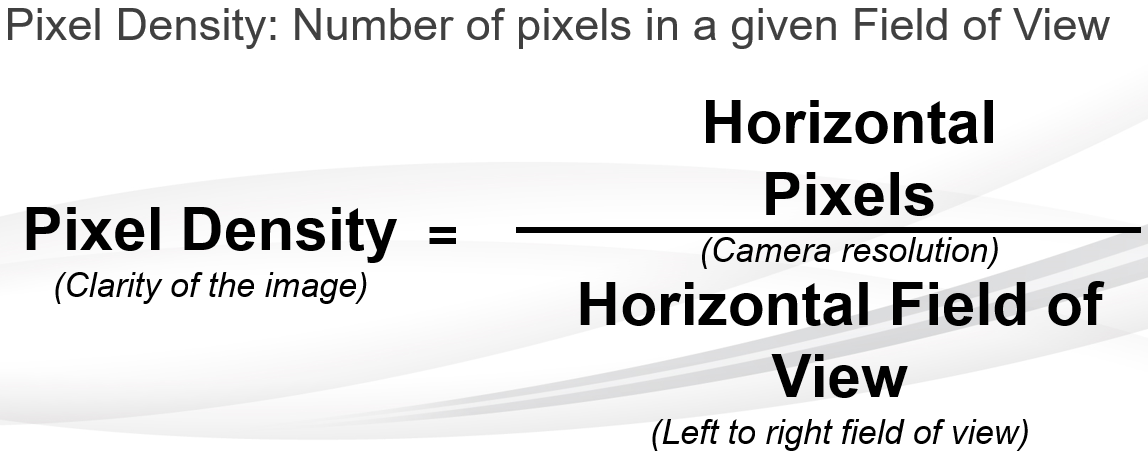
• Pixel density, will the resolution be sufficient to achieve the goal consistently?
• Optics, will the angle of view achieve the required pixel density, is the lens sufficient optic quality?
Hopefully you can identify from this list of considerations that each environment and capture area must be considered and planned for on an individual basis.
There is no one size fits all, plug and play solution here if we want to be successful here. One blanket statement I can make however is that projects where a camera is chosen and intended specifically for license plate recognition (LPR) tend to be more successful with this application than those where one camera is expected to capture plates in addition to other tasks like situational awareness.
To start we need to consider where we are capturing the vehicle plates.
Fast moving traffic will be difficult if the field of view is so wide a 5 megapixel or 4K camera must be used to keep the capture area pixel density high.
However if the traffic is slowed down and being captured at a gate, toll plaza, or entrance to a parking lot or other choke point these can work quite well to cover a wider area than say a 1080p model and possibly multiple lanes of traffic depending on mounting options for the camera.
The actual width of the target capture area needs to be measured and known. This is a critical variable that in addition to calculating pixel density will be used together with the camera distance from the field of view to determine the appropriate focal length and lens selection.
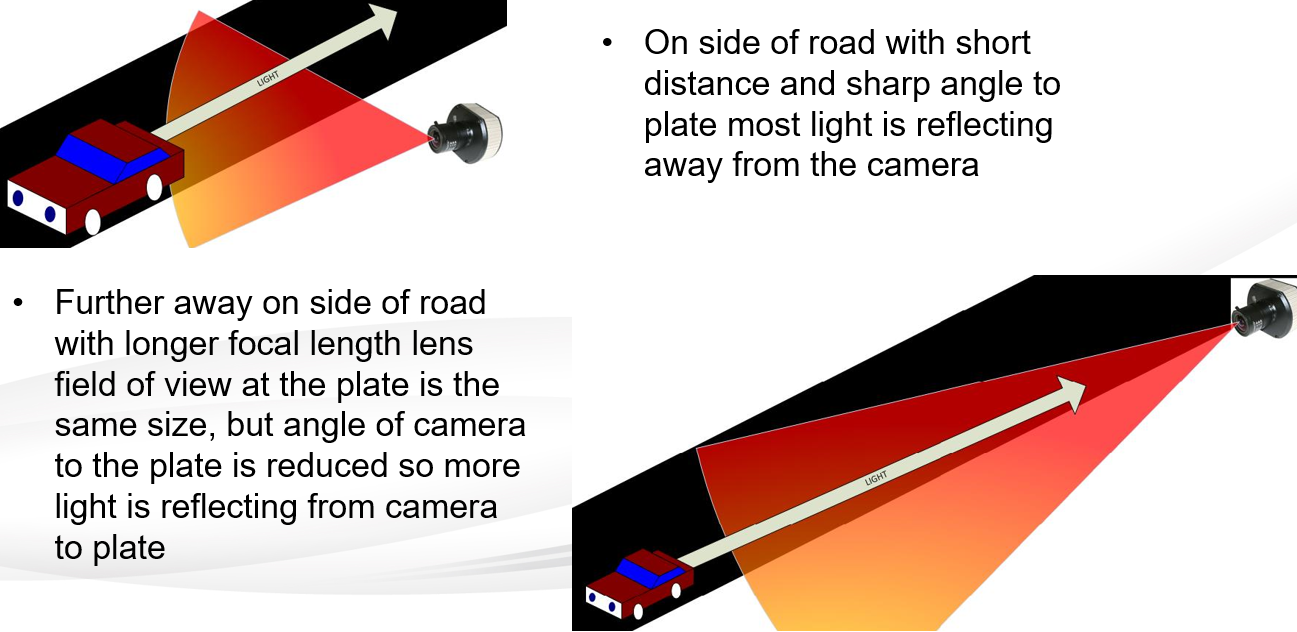
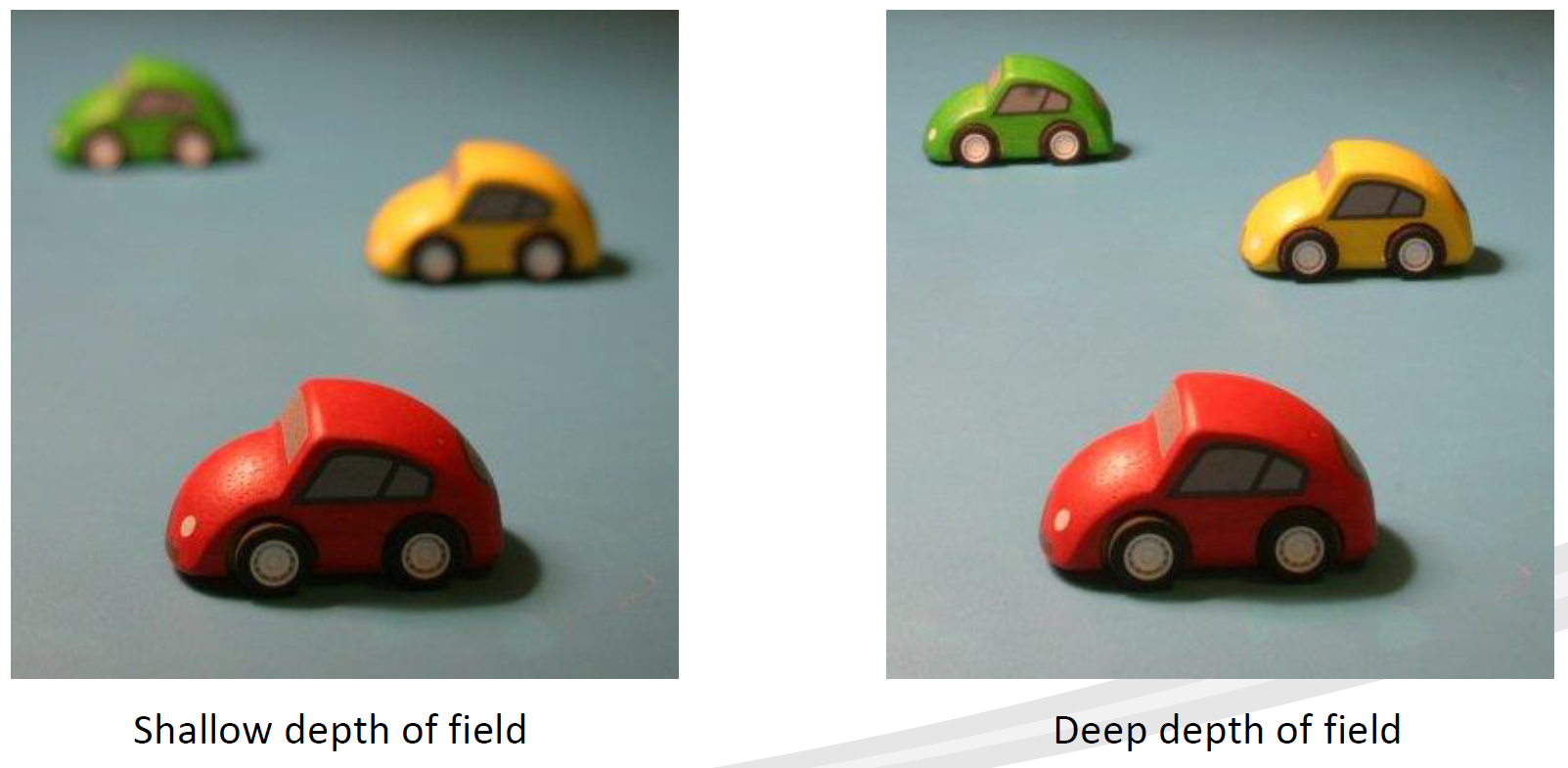
The position of the camera is also critical; ideally the camera needs to be positioned so it is as dead on perpendicular to the target area as possible. This will help prevent issues with depth of field that might occur when several lanes of traffic are monitored at an angle, where the effect is the plates in far lanes shear away from the camera into a less focused area.

This positioning will also help to ensure that the pixel density remains consistent through the entire area of capture because as the field of view gets wider the pixel density will be reduced. Position relative to the target is also the reason our multi sensor cameras, even the 20 megapixel variety would be a poor choice for this type of application.

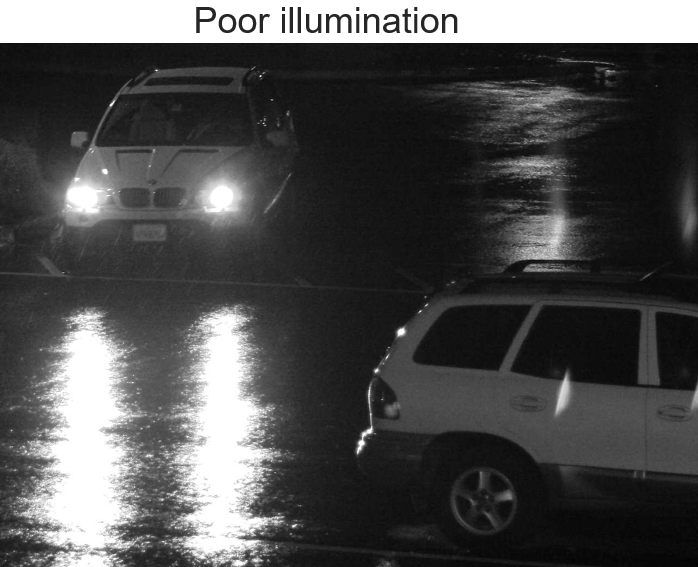
Illumination is also critical, if at night the area is poorly lit image noise will be an issue and the frame rate can drop off as the camera adjusts exposure time to compensate.
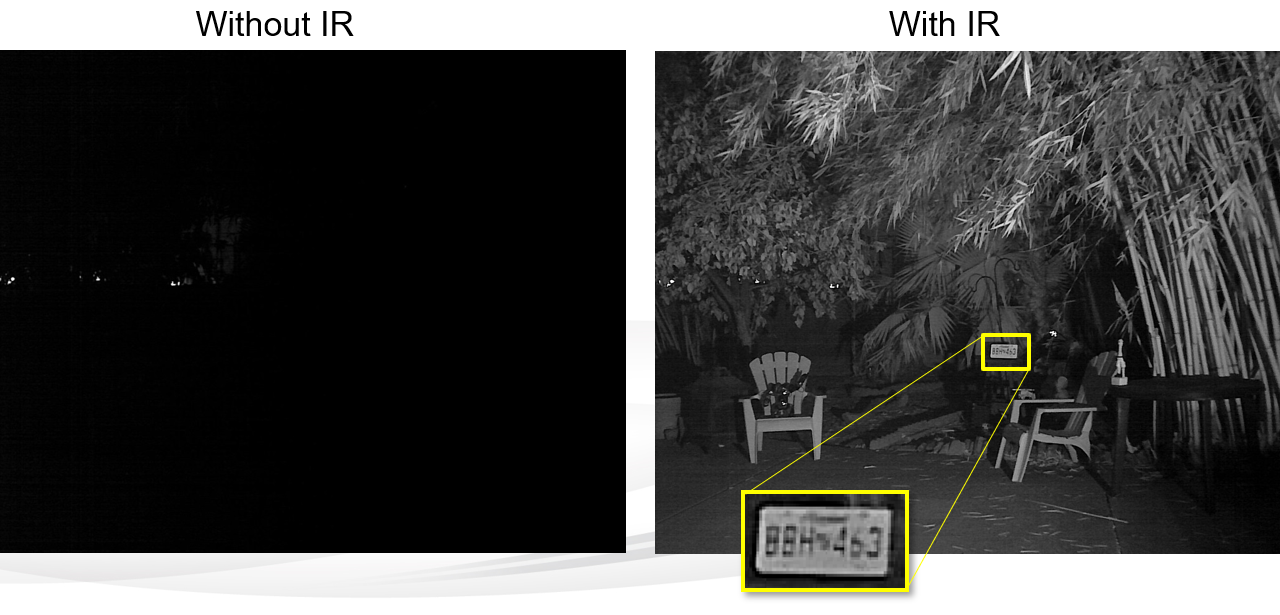
At night illumination should be chosen that can evenly illuminate not just the license plate but the entire field of view. This is because the camera will adjust its exposure based on the overall brightness of the image not just the area the plate is being viewed in.
You need to be able to adjust the illumination source angle relative to the camera position in case there is an issue with light reflection off the target. This is the reason that cameras with built in IR are not the best choice for this application. It is a lot easier to change the angle an external IR illuminator bounces off the target than to move the camera.
Car headlights are problematic; however most locales require rear plates and it’s always easier to capture a rear plate than deal with the glare of headlights trying to capture a plate on the front of a vehicle at night. If the application demands a front plate must be captured your options to compensate are limited to either placing the camera high enough that headlight glare is not an issue, or getting a housing for the camera that incorporates a high contrast system. If you try positioning the camera above the glare this will probably be up about 10’ to 15’ if the camera is not too far away from the target area. At a distance the beam angle will be too high for this to work, and even closer someone could still have their high beam or fog lights on.
The alternative is the high contrast system which consists of a special glass filter called a band bypass filter that only allows a particular wavelength IR light to pass, and an IR illuminator which is matched to the glass. Drawback here is such housing systems are expensive and hard to find, and once installed inside the only thing the camera will see is the plates and any reflected light in that wavelength. This works well, but not if you want to see the color car or the driver’s face as well.
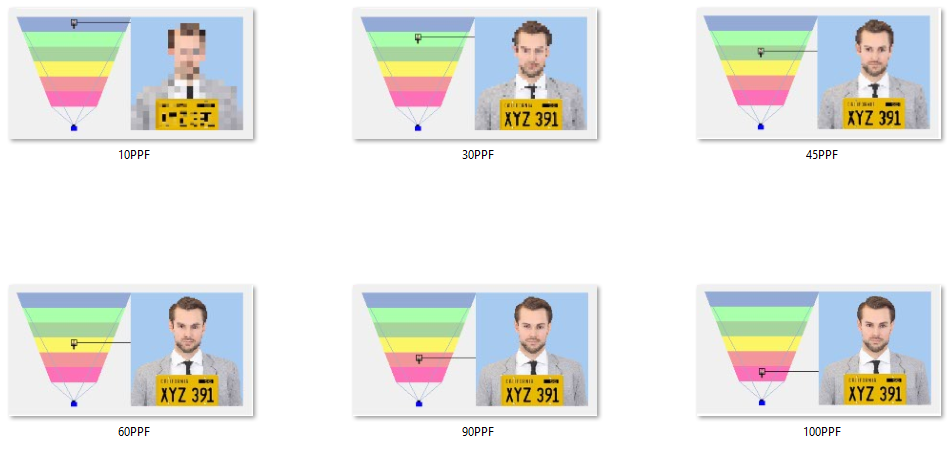
Pixel density is important and the higher the better the minimum will be determined by who or what is reading the plate. If an OCR application like the ANPR or PIPS system the software provider will have a specific minimum resolution requirement. If the reader is a human being however this is a lot more subjective. While most people can read a normal USA plate at 45 pixels per foot/ 148 pixels per meter, however some states such as Texas have actually made the numbers and letters on their plates smaller than the 1” x 2 ½” characters used on plates from other states in the US and Canada. In Europe and Asia plates are a bit bigger so it may be possible to get away with less. That said after supporting applications of this type with various issues I think 60 pixels per foot / 196 pixels per meter is a much safer minimum pixel density to use when planning for this application. This is because it adds an extra margin of error. I’ve found that in the transition from paper planning to the real world camera position and distance from the target don’t always end up being the same as what was envisioned in the design. This can have an unfortunate effect if the field of view being covered left no margin for error and the camera ends up farther away from the target than plan. It's always better to have a higher pixel density than a lower one to provide a bit of fudge factor if the camera should be mounted at a different height or distance from the target in the real world than planned.
Last consideration is optics, the focal length of the lens used will affect the field of view and pixel density equation above. Longer focal lengths will also offer better depth of field than shorter wider angle lenses.
In my experience even with the same lens in the same location it seems applications using a box camera and housing with flat glass are more successful than those using a dome style camera. I suspect that there is a prismatic effect of the curved dome that makes dome cameras more susceptible to glare issues from headlights.
So these are my tips for License Plate recognition keep them in mind when planning or supporting these type of applications. And be sure to allow extra installation time in your planning for these type of applications to allow for local scene adjustments and dialing in the setup.
Comments
0 comments
Please sign in to leave a comment.